求助A地图加载关闭程序卡住问题有无大牛帮看下
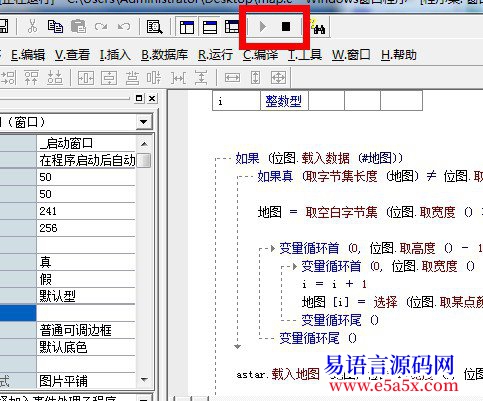
功能说明:该程序是一个基于A*(A-Star)启发式搜索算法的二维栅格地图路径规划工具,核心功能是:从预设的位图文件(#地图)中加载二值化地图(黑色像素表示障碍物/不可通行区域,白色或其他非黑色像素表示可通行区域),自动解析为字节集形式的0-1栅格地图;初始化A*寻路类实例,载入地图数据、宽度与高度信息;并在画板控件中实时显示原始地图底图。程序在启动时完成地图加载、二值化转换(黑→1/障碍,非黑→0/通行)、内存结构初始化(含主地图数组和临时工作数组),并校验数据一致性(如字节集长度是否匹配宽×高)。虽然当前代码片段未包含起点/终点交互设置、路径计算执行及结果绘制逻辑(如调用astar.寻路()、遍历路径节点、在画板上绘制线条等),但其完整架构已明确指向一个典型的“静态二维栅格环境下的最优路径求解与可视化系统”——即用户后续可通过鼠标点击设定起点与终点,触发A*算法运算,最终在画板上高亮显示从起点到终点的最短(或代价最小)无碰撞路径。整个程序采用面向对象设计(astar类封装地图管理、状态存储与寻路逻辑),依赖BmpOperate支持库实现位图读取与像素级操作,具备良好的扩展性与工程化基础,适用于机器人导航仿真、游戏AI寻路、智能体路径规划教学演示等场景。
======窗口程序集1
| |
| |------ __启动窗口_创建完毕
| |
| |
======astar
| |
| |------ _初始化
| |
| |------ _销毁
| |
| |------ 载入地图
| |
| |
======调用的Dll
| |
| |---[dll]------ RtlMoveMemory
注:本站源码主要来源于网络收集。如有侵犯您的利益,请联系我们,我们将及时删除!
部分源码可能含有危险代码,(如关机、格式化磁盘等),请看清代码在运行。
由此产生的一切后果本站均不负责。源码仅用于学习使用,如需运用到商业场景请咨询原作者。
使用本站源码开发的产品均与本站无任何关系,请大家遵守国家相关法律。